賽項(xiàng)簡介
全國大學(xué)生智能汽車競賽是教育部倡導(dǎo)的大學(xué)生科技競賽之一,,立足培養(yǎng)大學(xué)生的創(chuàng)意性科技能力。
本賽項(xiàng)以“智能倉儲(chǔ)”為主題,,基于SLAM、導(dǎo)航,、計(jì)算機(jī)視覺,、多機(jī)協(xié)同等前沿技術(shù),并結(jié)合基礎(chǔ)的機(jī)械設(shè)計(jì)改裝,,以模擬實(shí)現(xiàn)空地協(xié)同,、無人化和智能化的庫存盤點(diǎn)工作。

一,、參賽要求
1.1參賽對(duì)象
1,、全日制在校研究生、本科生和全國在籍中職,、高職學(xué)生,。
2、競賽分為職教組和高教組兩個(gè)組別,。
職教組:全國在籍中職,、高職學(xué)生。
高教組:全日制在校本科,、研究生,。
1.2隊(duì)伍組成
1、大疆行業(yè)應(yīng)用·天途智能倉儲(chǔ)采取團(tuán)體賽形式,,每支參賽隊(duì)選手不超過6人(其中高教組最多1名研究生),。
2、每支隊(duì)伍指導(dǎo)老師不超過2人,。如果是兩名指導(dǎo)教師,,兩名指導(dǎo)教師必須有不同的專業(yè)背景。
1.3參賽單位
1、參賽隊(duì)以學(xué)校為單位進(jìn)行報(bào)名,,每個(gè)學(xué)校報(bào)名參賽的隊(duì)伍不超過2支,,不得跨校組隊(duì)。
2 ,、參賽選手報(bào)名須保證所提供的個(gè)人信息真實(shí),、準(zhǔn)確、有效,,否則將取消選手參賽資格,。
3 、參賽隊(duì)伍報(bào)名成功后,,不得再隨意更改或替換參賽隊(duì)員,。
二、競賽安排
2.1競賽日程表
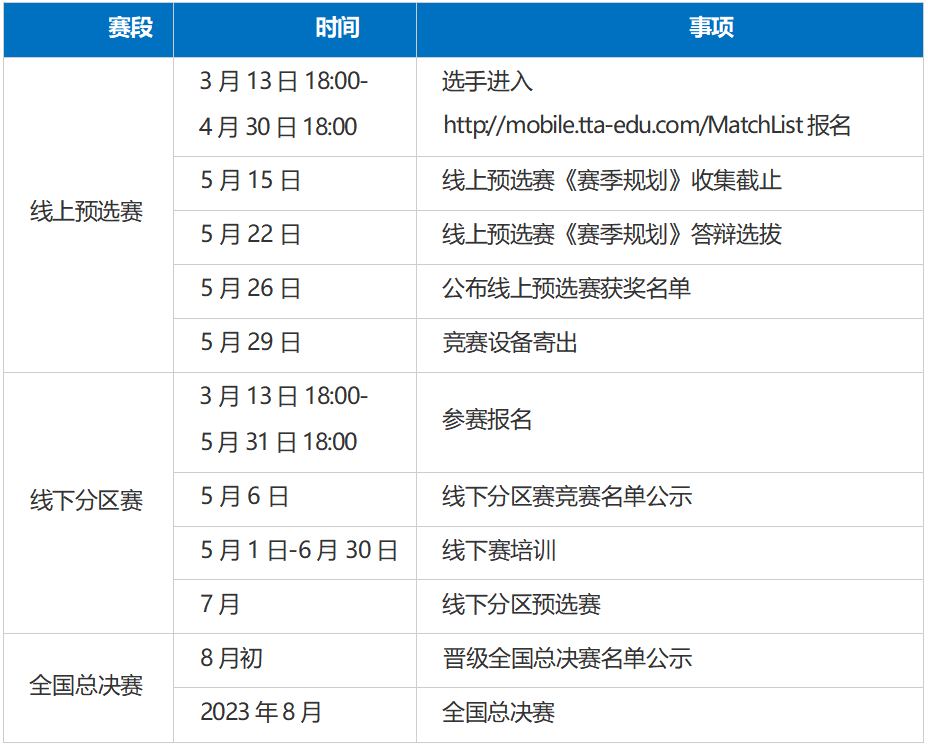
本次大賽共分為線上預(yù)選賽,,線下分區(qū)賽和線下全國總決賽三個(gè)階段,。2023年競賽時(shí)間規(guī)劃如下表所示:
2.2線上預(yù)選賽選拔方式:
說明:本次線上預(yù)選賽僅作為競賽設(shè)備贊助的依據(jù),不作為大賽最終成績參考,。不參加線上預(yù)選賽的隊(duì)伍也可報(bào)名參加線下分區(qū)賽,。
參與對(duì)象:報(bào)名參與線上預(yù)選賽的隊(duì)伍可以參與該環(huán)節(jié)。
參與形式:以參賽隊(duì)伍為單位,,通過隊(duì)長登錄系統(tǒng)報(bào)名提交,。
報(bào)名時(shí)間:2023年3月13日18:00-2023年4月30 日18:00。
選拔方式:線上預(yù)選賽采取《賽季規(guī)劃》作品征集和騰訊會(huì)議線上答辯形式進(jìn)行,,請(qǐng)各參賽隊(duì)伍仔細(xì)閱《賽季規(guī)劃》模板進(jìn)行作品撰寫,,要求作品 邏輯清晰,重點(diǎn)突出,。
2.3《賽季規(guī)劃》模板文檔:
模板獲取方式:https://docs.qq.com/doc/DU2lmc0pVU3hRSnl6文檔要求:
PDF格式文檔+表格(項(xiàng)目進(jìn)度安排表和團(tuán)隊(duì)預(yù)算及成本控制方案) ,,PDF格式文檔:正文小四號(hào)宋體(中文) ,固定1.5倍行距;
表格格式格式文檔:正文11號(hào)宋體(中文)或 Times?New?Roman(英文),;設(shè)置自動(dòng)換行,、自動(dòng)調(diào)整行高及列寬;非特殊必要,,保持所有文本垂直居中,,并統(tǒng)一水平左對(duì)齊或居中對(duì)齊。
文檔命名格式:學(xué)校+隊(duì)名+規(guī)劃文檔,;學(xué)校+隊(duì)名+進(jìn)度安排,;學(xué)校+隊(duì)名+團(tuán)隊(duì)?預(yù)算。
獎(jiǎng)勵(lì)內(nèi)容:綜合線上預(yù)選賽評(píng)比高教組和職教組累計(jì)前30名的參賽隊(duì)伍將獲得天途贊助的競賽平臺(tái)一套(大賽期間免費(fèi)使用權(quán)) ,,第31名-60名的隊(duì)伍可享受天途低價(jià)出租大賽設(shè)備的優(yōu)惠,。
2.4線上預(yù)選賽評(píng)分規(guī)則如下:
規(guī)則文檔:https://docs.qq.com/sheet/DU0hSZXhGeUlGUGx1?tab=BB08J2
三,、競賽內(nèi)容
3.1競賽場(chǎng)地:
比賽場(chǎng)地(以下簡稱“賽場(chǎng)”)是一個(gè)長9米、寬4.6米的區(qū)域(如圖2所示) ,,賽場(chǎng)外圍有上邊沿距離賽場(chǎng)地面高度為4米的圍擋,。賽場(chǎng)內(nèi)設(shè)有作業(yè)啟動(dòng)/終止區(qū)、貨架,、待盤點(diǎn)的貨物和無人機(jī)臨時(shí)安全起落區(qū),。

作業(yè)啟動(dòng)/終止區(qū)(A區(qū)) :系統(tǒng)啟動(dòng)/終止作業(yè)的位置。
貨架放置區(qū)(B區(qū)) :兩排高為2米的貨架會(huì)固定放置在該區(qū)域內(nèi)(待盤點(diǎn)的貨物會(huì)隨機(jī)分布在貨架上) ,。
無人機(jī)臨時(shí)安全起落區(qū)(C區(qū)) :允許無人機(jī)進(jìn)行臨時(shí)性起飛/降落操作的區(qū)域,。

注:所有場(chǎng)地道具的尺寸誤差均在±5%以內(nèi)。場(chǎng)地尺寸標(biāo)注圖中所標(biāo)注的尺寸參數(shù)單位為mm,。

圖4-賽場(chǎng)俯視圖

圖5-賽場(chǎng)斜視圖

圖6-現(xiàn)場(chǎng)斜視圖
3.2 AB雙賽場(chǎng)機(jī)制
AB雙賽場(chǎng)機(jī)制僅針對(duì)職教組有效,。即職教組的賽場(chǎng)整體分為A版和B版兩個(gè)版本,相較于A版賽場(chǎng),,B版賽場(chǎng)中增設(shè)了藍(lán)色引導(dǎo)線,,用于為智能車和無人機(jī)行駛提供引導(dǎo),如圖6所示,,參賽隊(duì)可以在每輪比賽開始前,,根據(jù)隊(duì)伍策略自行確定使用A版或B版賽場(chǎng)。由于使用B版賽場(chǎng)會(huì)造成比賽的整體難度大幅下降,,因此,若參賽隊(duì)該輪選擇使用B版賽場(chǎng),,則會(huì)對(duì)該輪總分進(jìn)行固定比例的折算(總分*難度系數(shù)) ,。參賽隊(duì)需要根據(jù)自身實(shí)力綜合評(píng)估,制定合理的比賽策略,。

圖7-職教組 B版賽場(chǎng)示意圖
3.3賽場(chǎng)圍擋
賽場(chǎng)圍擋上部為網(wǎng)孔狀,,方便裁判及選手觀察機(jī)器運(yùn)行狀態(tài);圍擋下部封閉無網(wǎng)孔,,以減少賽場(chǎng)外部環(huán)境對(duì)場(chǎng)內(nèi)智能車運(yùn)行的干擾,,圍擋樣式如圖8所示。

圖8-圍擋示意圖
3.4貨架及待盤點(diǎn)的貨物
單排貨架長5米(2×1.5m+2×1m) ,、寬0.3米,、高2米,一共分為3層,。每次比賽中會(huì)有固定數(shù)量(20個(gè))的貨物被按照固定擺放方案在貨架上,,如圖9所示。貨物沒有固定的尺寸,,但每個(gè)待盤點(diǎn)貨物正向通道的立面均會(huì)粘貼帶有該貨品信息的二維碼 ?(二維碼樣例在附錄B) ,,大小為 12cm*12cm,,二維碼在該立面粘貼的位置不固定。

圖9-貨物放置及貨架分區(qū)示意圖
貨架上會(huì)有特定數(shù)字的標(biāo)號(hào),,標(biāo)記貨物的所在的分區(qū)位置,,實(shí)際貨架細(xì)節(jié)圖將在后續(xù)公布。
3.5競賽任務(wù)
1,、前置任務(wù):每個(gè)隊(duì)伍上場(chǎng)比賽時(shí),,需要在指定的時(shí)間內(nèi),在當(dāng)值裁判組的監(jiān)督下對(duì)系統(tǒng)進(jìn)行部署和調(diào)試,。(職教組的參賽隊(duì)需要先與當(dāng)值裁判組確認(rèn)本輪比賽所使用的場(chǎng)地類型,。)
2、賽題任務(wù):圍繞比賽主題——智慧倉儲(chǔ),,在指定的比賽時(shí)間內(nèi),,利用無人機(jī)和智能車開展空地協(xié)同作業(yè),完成多項(xiàng)子任務(wù),,最終實(shí)現(xiàn)對(duì)倉庫內(nèi)的貨物進(jìn)行盤點(diǎn),。
【任務(wù)1:無人機(jī)啟動(dòng)】在主裁判通過裁判系統(tǒng)對(duì)無人機(jī)與智能車下達(dá)開始作業(yè)指令后,無人機(jī)需要在啟動(dòng)區(qū)內(nèi)完成起飛動(dòng)作,,無人機(jī)完全脫離與智能車的接觸,,視為無人機(jī)起飛完成。
【任務(wù)?2:智能車啟動(dòng)】無人機(jī)完成起飛動(dòng)作后,, 智能車在規(guī)定的時(shí)間內(nèi)離開啟動(dòng)區(qū)域,。
【任務(wù)3:掃碼作業(yè)】無人機(jī)和智能車需要沿貨架間的通道進(jìn)行安全行駛和飛行,并分別對(duì)貨上的貨物進(jìn)行掃碼盤點(diǎn)作業(yè),,最后將貨品信息按格式要求匯總成一份表格文件,,并在完成任務(wù)5后,需要在規(guī)定時(shí)間內(nèi)將文件回傳至裁判系統(tǒng),,裁判系統(tǒng)會(huì)對(duì)比真?實(shí)貨物清單與參賽隊(duì)提交的表格文件得出該任務(wù)得分,。表格示例文件在附錄A。
【任務(wù)4:模擬充電】無人機(jī)在作業(yè)過程中需要選擇合適的時(shí)機(jī)和位置降落回智能車平臺(tái)上,,完成一次模擬充電,。
①無人機(jī)的臨時(shí)起飛/降落必須在無人機(jī)臨時(shí)安全起落區(qū)(C區(qū))內(nèi)完成;
②無人機(jī)降落回智能車平臺(tái)后,,需要在平臺(tái)上保持停留5秒以上,,視為完成模擬充電;
【任務(wù)5:空地返航】無人機(jī)和智能車在完成盤點(diǎn)作業(yè)后,,需要返回起始點(diǎn),,無人機(jī)需要在停止區(qū)內(nèi)降落并停槳,智能車完整??吭谕V箙^(qū)內(nèi),,當(dāng)兩者均滿足后視為完成該階段任務(wù),。
3.6比賽設(shè)備
本次競賽用地面端車模僅允許使用天途RM-BOX-A智能車,,智能車外觀如圖11所示,,智能車的主要參數(shù)如表1所示。參賽隊(duì)可以根據(jù)自身的參賽策略,,基于智能車進(jìn)行加裝設(shè)計(jì),,即需要基于圖11所展示的基礎(chǔ)底盤,自行設(shè)計(jì),、加裝停機(jī)坪等結(jié)構(gòu)件,。需要注意,原裝的最小部件單元禁止進(jìn)行任何形式的改裝,,如電池,、主控器、電機(jī)等,。改裝后,,整機(jī)尺寸不超過長 500mm,寬450mm,,高330mm,。

圖10-天途RM-BOX-A智能車
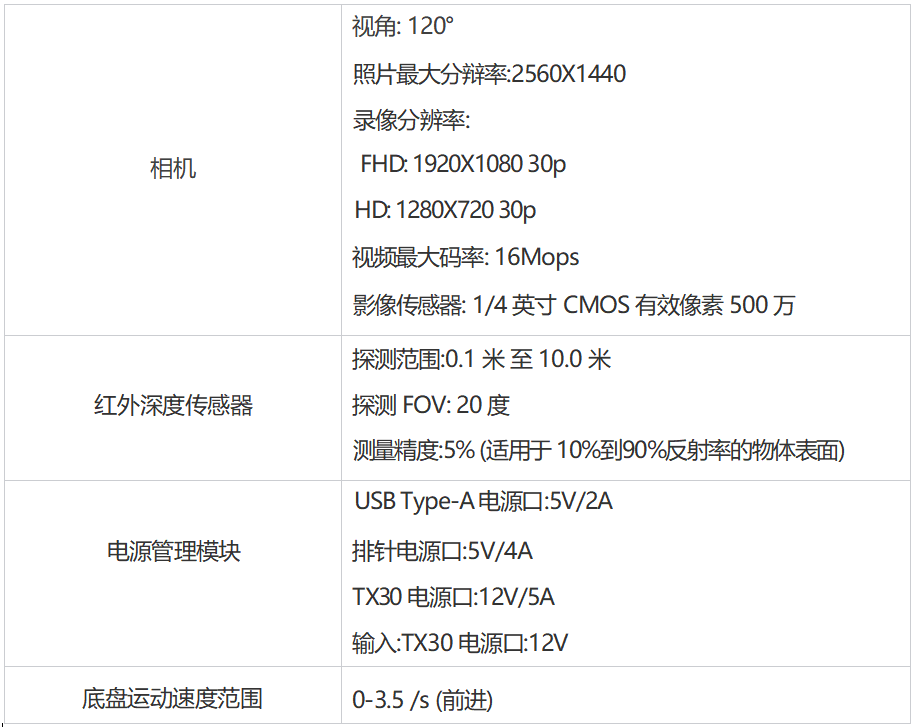
表1-天途RM-BOX-A智能車主要參數(shù)
2、地面端用車模-車載算力盒子

圖11-車載算力盒子
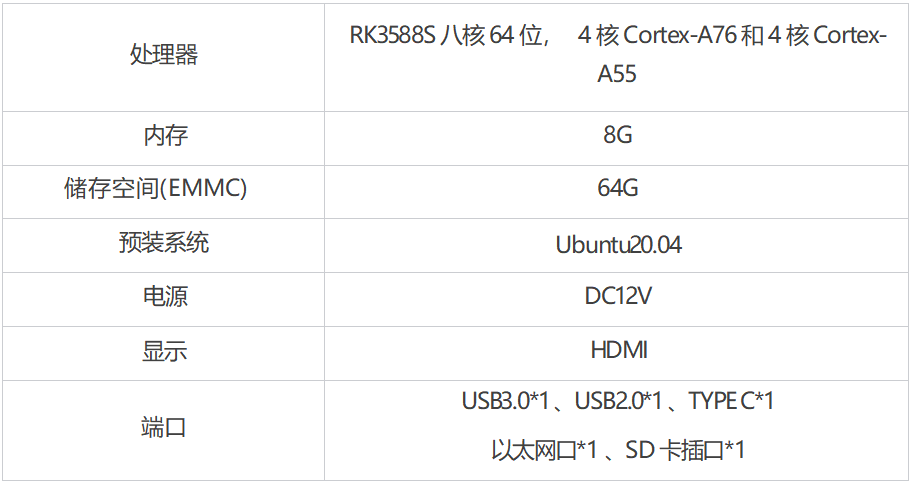
表2-車載算力盒子主要參數(shù)
3,、比賽用車模-天空端
本次競賽用天空端車模僅允許使用天途M3-BOX系列無人機(jī),,該系列無人機(jī)包含A?、B兩個(gè)版本,,如圖11所示,,無人機(jī)的主要參數(shù)如表2所示,參賽隊(duì)可結(jié)合實(shí)際情況自行選擇,。需要注意天空端無人機(jī)不允許任何改造,開發(fā)僅限于運(yùn)用已有的機(jī)載傳感器,。天途M3-BOX系列無人機(jī)原裝的所有部件禁止任何形式的拆卸,,即無人機(jī)自帶的電池、?控制器,、槳葉,、執(zhí)行器、機(jī)臂結(jié)構(gòu),、算力盒子等,,嚴(yán)禁進(jìn)行任何形式的改裝。

圖12.1-天途M3-BOX-A無人機(jī)

圖12.2-天途M3-BOX-B無人機(jī)
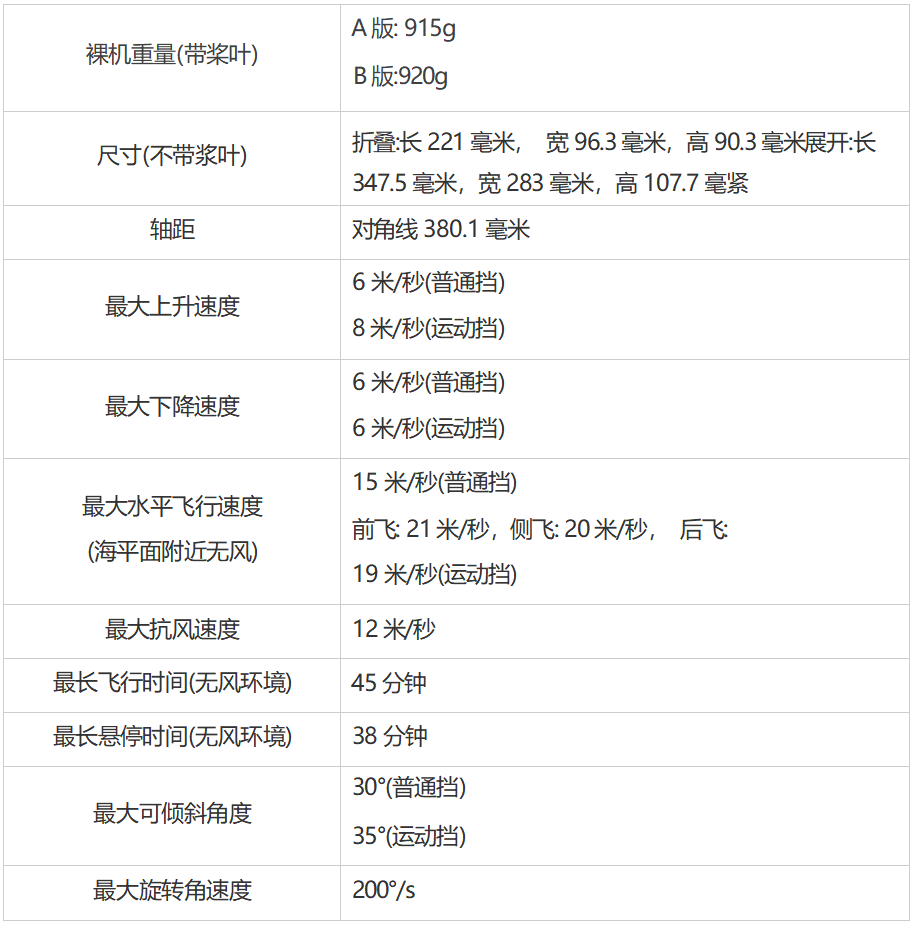
表3-天途M3-BOX系列無人機(jī)關(guān)鍵參數(shù)表
4,、空端用車模-機(jī)載算力盒子
本次競賽用地面端車模僅允許使用天途RM-BOX-A智能車,,智能車外觀如圖11所示,,智能車的主要參數(shù)如表1所示。參賽隊(duì)可以根據(jù)自身的參賽策略,,基于智能車進(jìn)行加裝設(shè)計(jì),,即需要基于圖11所展示的基礎(chǔ)底盤,自行設(shè)計(jì),、加裝停機(jī)坪等結(jié)構(gòu)件,。需要注意,原裝的最小部件單元禁止進(jìn)行任何形式的改裝,,如電池,、主控器、電機(jī)等,。改裝后,,整機(jī)尺寸不超過長500mm,寬450mm,,高330mm,。

圖13-機(jī)載算力盒子
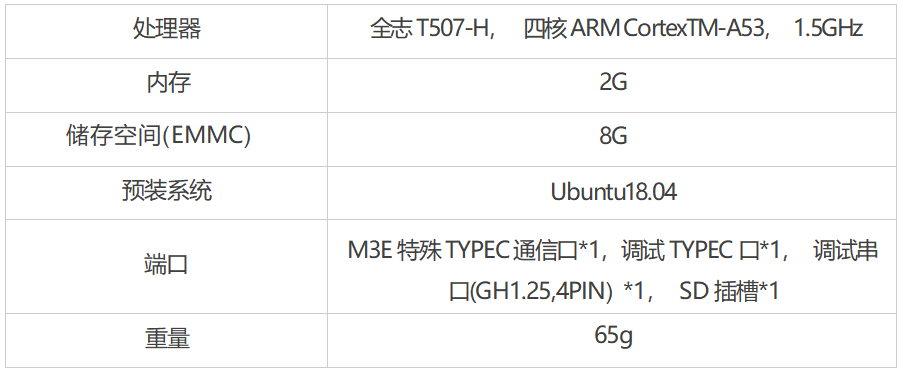
表4-機(jī)載算力盒子主要參數(shù)
3.7裁判系統(tǒng)
裁判系統(tǒng)由WIFI路由器局域網(wǎng)和裁判系統(tǒng)電腦主機(jī)組成,參賽隊(duì)伍的設(shè)備可以連接局域網(wǎng)作為多機(jī)協(xié)同的網(wǎng)絡(luò)通訊方式,,同時(shí)裁判系統(tǒng)也會(huì)采集部分比賽數(shù)據(jù)如比賽運(yùn)行時(shí)間,、無人機(jī)控制狀態(tài):手動(dòng)/自動(dòng)、貨物清單提交等,,裁判系統(tǒng)也會(huì)發(fā)布部分比賽數(shù)據(jù),,如裁判發(fā)布比賽開始指令。
參賽隊(duì)伍需要至少有一臺(tái)設(shè)備接入局域網(wǎng)中與裁判系統(tǒng)通訊,。
具體裁判系統(tǒng)細(xì)則將在后續(xù)發(fā)布,。
四、評(píng)分體系
4.1重要說明
1,、競賽包括兩部分:①比賽前提交比賽源碼及對(duì)應(yīng)的技術(shù)說明文檔,;②現(xiàn)場(chǎng)正式比賽。兩個(gè)部分均為必考項(xiàng),,缺少任意一項(xiàng)視為放棄比賽資格,。
2、參賽隊(duì)伍需提交參賽代碼包與技術(shù)報(bào)告至組委會(huì),。提交方式會(huì)在開賽前通知至各參賽隊(duì),。3、關(guān)于正確返回出發(fā)區(qū)域:2個(gè)輪子在停泊區(qū)域內(nèi)視為未完成停泊,,未完成該,,3個(gè)輪子在停泊區(qū)域內(nèi)視為未完全完成停泊,罰時(shí)10s,,4個(gè)輪子均在停泊區(qū)域內(nèi)視為完成停泊,。
4,、關(guān)于掃碼作業(yè)的表格文件:當(dāng)無人車完成返回出發(fā)區(qū)域任務(wù)后30秒內(nèi)需要提交貨物清單表格文件,超時(shí)提交則視為未完成該任務(wù),。
5,、關(guān)于掃碼作業(yè)的表格文件:若參賽隊(duì)伍的表格文件被裁判系統(tǒng)判定為不符合格式要求,將由裁判再次審核,,若不符合格式要求則視為未完成該任務(wù),,若裁判人工審核后符合要求則可視為完成該任務(wù)。
4.2評(píng)分細(xì)則
①(智能車/無人機(jī))碰撞圍欄:比賽用時(shí)加 5 秒/次
②(智能車/無人機(jī))碰撞貨架:比賽用時(shí)加 5 秒/次
③未正確返回出發(fā)區(qū)域:未完成將視為該任務(wù)失敗,,未完全完成則加10秒
④核對(duì)貨物清單:與裁判真實(shí)貨物清單比對(duì)后,,每缺少一個(gè)貨 物比賽用時(shí)加2秒/個(gè)
⑤模擬充電任務(wù):通過裁判判定完成該任務(wù)可以比賽用時(shí)減30?秒
⑥手動(dòng)控制(僅職教組):比賽總用時(shí)將乘以1.5 倍
⑦采用 B 版地圖(僅職教組):比賽總用時(shí)將乘以1.5 倍
⑧比賽總用時(shí):完成所有任務(wù)用時(shí)+碰撞圍欄次數(shù)*5s+碰撞貨架次數(shù)*5s+未正確返回出發(fā)點(diǎn)(10s) ?+貨物清單缺少個(gè)數(shù)*2s-完成模擬充電任務(wù)
4.2任務(wù)完成標(biāo)準(zhǔn)
①無人機(jī)啟動(dòng)
要求:裁判下達(dá)比賽開始無人機(jī)需要在啟動(dòng)區(qū)內(nèi)在 60s 內(nèi)完成起飛動(dòng)作,當(dāng)無人機(jī)完全脫離與智能車的接觸,,視為無人機(jī)起飛完成,。
②智能車啟動(dòng)
要求:無人機(jī)完成起飛任務(wù)后, 智能車在60s內(nèi)離?開啟動(dòng)區(qū)域,,視為智能車啟動(dòng)完成,。
③掃碼作業(yè)
要求:完成將貨品信息按格式要求匯總成一份表格 文件,并在完成任務(wù) 5 后,,需要在 30s 內(nèi)將?文件回傳至裁判系統(tǒng),,提交了表格文件, ?視?為掃碼作業(yè)完成,。(表格內(nèi)容校核不計(jì)入任務(wù)完成指標(biāo))
④模擬充電
要求:無人機(jī)的臨時(shí)起飛/降落必須在無人機(jī)臨時(shí)安全起落區(qū)(C?區(qū))內(nèi)完成,。 ??無人機(jī)降落回智?能車平臺(tái)后,需要在平臺(tái)上保持停留5秒以上,,視為完成模擬充電,。
⑤空地返航
要求:無人機(jī)和智能車在完成盤點(diǎn)作業(yè)后,需要返回?起始點(diǎn),, ?無人機(jī)需要在停止區(qū)內(nèi)降落并停槳,,?智能車完整停靠在停止區(qū)內(nèi),,當(dāng)兩者均滿足后?視為完成空地返航任務(wù),。(沒有要求必須停在智能車平臺(tái)上)
【最終解釋權(quán),歸組委會(huì)所有,。】
4.4特殊情況
1,、參賽隊(duì)員在競賽過程中應(yīng)該遵守相關(guān)的規(guī)章制度和安全守則,,如有違反,將取消其競賽資格,。
2,、比賽過程中參賽隊(duì)員嚴(yán)禁使用通訊工具與外界進(jìn)行信息交互,,不得擅自離開本參賽隊(duì)賽位或與其他賽位的選手交流或在賽場(chǎng)大聲喧嘩,嚴(yán)重影響賽場(chǎng)秩序,,如有發(fā)生,,將取消其競賽資格。
3,、比賽過程中參賽隊(duì)員不得進(jìn)入比賽場(chǎng)地內(nèi),。比賽過程中若無人機(jī)出現(xiàn)失控情況,參賽隊(duì)員應(yīng)隨時(shí)準(zhǔn)備接管無人機(jī)防止設(shè)備進(jìn)一步損壞,。若出現(xiàn)無人機(jī)或無人車失控碰撞的情況,,參賽隊(duì)員可以提出比賽終止申請(qǐng),最終由裁判判斷比賽終止,,無法繼續(xù)執(zhí)行比賽,,需要人工干預(yù)則視為本次任務(wù)挑戰(zhàn)失敗,本次任務(wù)僅保留已有得分,。
4,、裁判發(fā)令后,無人機(jī)在60秒內(nèi)沒有啟動(dòng),,比賽得分記為0,。
5、比賽設(shè)備沖出場(chǎng)地,、失控則比賽結(jié)束,,當(dāng)前得分作為最終得分。
6,、 比賽設(shè)備完成賽題任務(wù)過程中,,停止運(yùn)行超過60秒,比賽立即結(jié)束,,當(dāng)前成績記為比賽最終成績,。
7、無人機(jī)或無人車觸碰圍欄或貨架連續(xù)超過30秒,,比賽結(jié)束,,以當(dāng)前成績記為比賽最終成績。
五,、競賽答疑
請(qǐng)各位參賽隊(duì)伍報(bào)名后盡快掃碼加入“智能倉儲(chǔ)”技術(shù)交流群,;所有參賽隊(duì)伍選手都可進(jìn)入該群進(jìn)行技術(shù)交流。
QQ交流群:591100076

QQ交流群:591100076
賽事后續(xù)通知及規(guī)則補(bǔ)充,,請(qǐng)關(guān)注全國大學(xué)生智能汽車競賽官(smartcar.cdstm.cn/),、微信公眾號(hào)(TsinghuaJoking)(DJI?大疆行業(yè)應(yīng)用服務(wù)) (天途航空) 并請(qǐng)掃碼下載掌上天途 APP報(bào)名。